System Design 1 - Chapter 7, 8
25 June 2025, Bastian Luettig
Platform Management: Law
Requirements
Examples: no Inherent Computer Replica Determinism
Other applications do not feature this inherently:
- A340 Flight Control System: features load factor control and master-status
- Airbus Autopilot: stores target altitude in each computer
Forced Computer Replica Determinism
If an application does not inherently achieve computer replica determinism, the management software can force it to do so by e.g. forcing internal states or implementing drift compensation
Example: Discrete Decisions
We ensured using PLAMA:SENSOR, that all discrete sensors exhibit identical values. But: what about pseudo discretes?
Conclusion: Computer Replica Determinism
Certain effects may violate computer replica determinism
- drift
- counters
- discrete secisions
Forced Computer Replica Determinism
Whenever an applications unses one of the above, PLAMA:LAW has to force the applications into computer replica determinism by drift-compensation, internal state overriding or by making discrete decisions identical
Consolidation Management
Components
- Zsfu: evaluates highest possible mode (with respect to platform status) and valid indication for commands
- Tlaw: actual control law, creates commands
- dbcss: contains information from PLAMA:SENSOR and PLAMA:ACTOR: redundant signal values, valid indication, status of actor components
- FRBC: provides Reliable BroadCast for pseudo discretes
- FBC, FVoting, FDrift provide drift and counter compensation
- FMonitor provides cross-computer-lane monitoring
- Fopma decides which degradation to perform
Replicas execute computer-replica-deterministic, if for identical input values, they produce identical output values (refers to both, values and order of values)
Supervisor Management
Find the degredation model the law should actually perform
The aircraft must not execute normal or alternate law when it is on-ground, because the load factor control is unavailable
State transfer function
The state transfer function has two distinct tasks: (1) evaluate the highest possible degradation mode zmode.sfu, depending on available sensors, actors and computers; and (2) evaluate the valid information for each command, depending on the actual degradation mod e smode.law.
Which simplification can we perform?
- if the redundant computer evaluates the state transfer function, it is not failed
- PLAMA:SENSOR evaluates the sensor data
- each state $z_{\text{mod, x}}$ is replaced by $s_{\text{off, x}}$
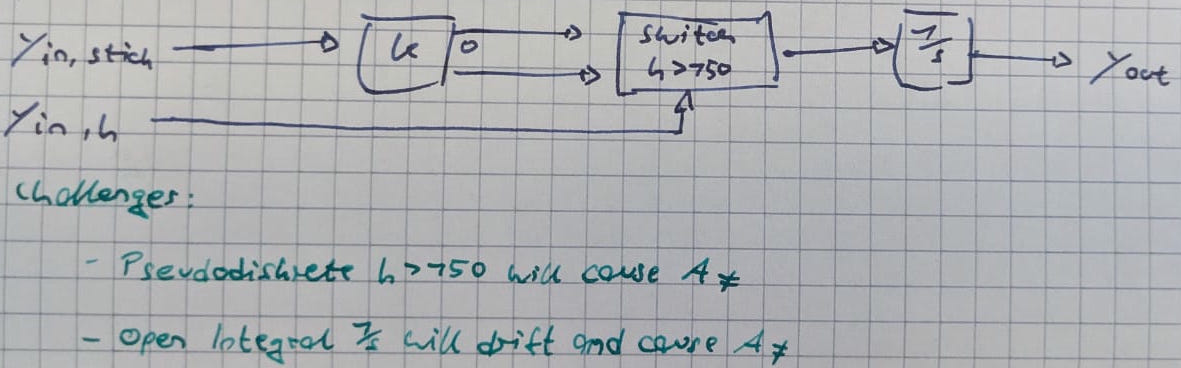
Signal Transfer Function $\tau_{\text{law}}$
PLAMA:LAW ensures Core Consensus - even for cases that differ from the fundamental Computer-Replica_Determinsim definition
If an applications uses pseudo-discretes or not BIBO-stable functions, PLAMA:LAW forces the application to pruduce $A_\Delta / A_=$
The state transfer function $Z_\text{sfu}$ and $\varepsilon _\text{sfu}$ allow the application to detect its maximum execution mode and $F_\text{opma}$ computes the actual execution mode
Platform Management: Actor
Requirements
The platform management actor is suitable for the redundant computer, if it guarantees that the redundant computer ($M_{rfcc}$) correctly controls the actuators in all valid operating scenarios
What does ”performs correctly” mean? The redundant computer correctly commands actors in all valid operating scenarios, if it shows:
- synchrony
- agreement
- integrity
- PLAMA:ACTOR ensures actuator consensus
- PLAMA:ACTOR ensures $P(\mathbb{Z}_\text{fo, ra}) < 1,5 \cdot 10^{-10}$
Fundamentals
Actuators: Challenges and Concepts
Single Actuator Components
Actuators may have components that exist individually for each commanding computing lane.
- coils that drive a direct drive valve
- sensors for currents or positions
- solenoids
Common Actuator Components
An actuator will have components that are common to all commanding computing lanes.
- direct drive valve
- mode valve
- control piston
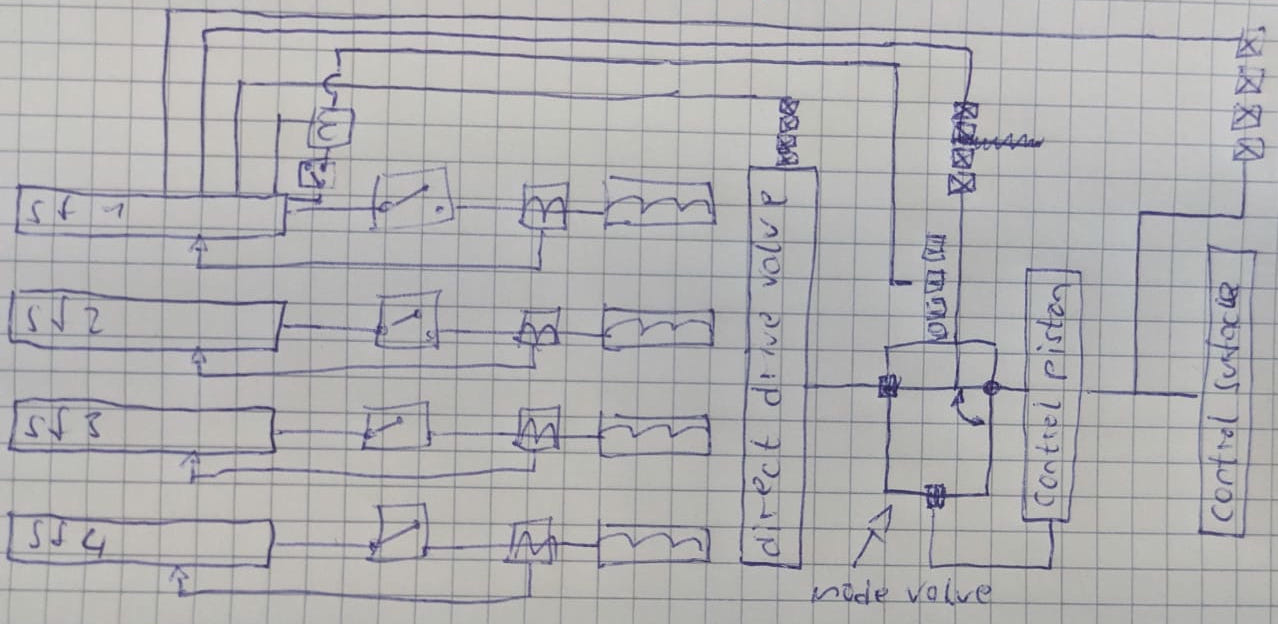
Hydraulic Actuator
Parts
- Coils that computers control with switches to passivate the outputs and sensors
- Solenoids that computers control with switches
- sensors on each common actuator component
Operation
- Lanes command a current to the coils
- coils generate an electromagnetic field that pushes the direct drive valve
- the lanes power the solenoids that hold the switch on the mode-valve
- this then commands hydraulic fluid (left and below mode valve in drawing) to actuate the control piston
- the control piston moves the mechanical shaft (right of mode valve in drawing) to move the control surface
Tasks
- Faulty Sensors
- The system consists of five redundant sensors
- Each redundant sensor exists as quadruplex sensor with 1:1 strapping and follows F/O-F/O-F/P operation
- Use PLAMA:SENSOR to find defectuve single sensors and have a correct redundant sensor value
Next Week: AI Guest Lecture