System Design 1 - Chapter 3
30 April 2025, Bastian Luettig
Markov Analysis
Assess a systems state based on its components states

Markov Tree You should know this for the exam
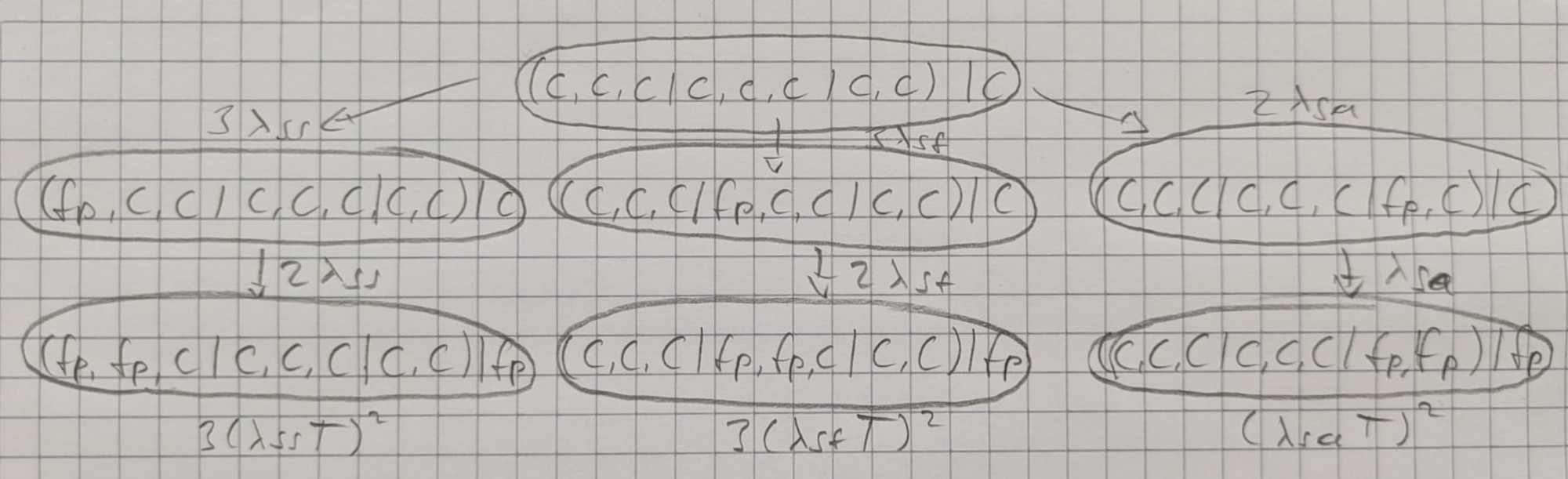
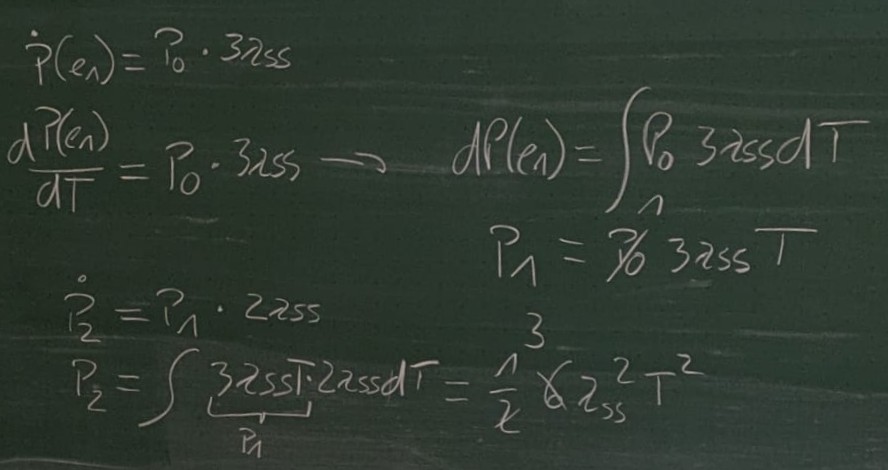
In general, we assume a strictly-fail-passive operated component (i.e. sensors and computers) with redundancy degree $r$:
$$P(\mathbb{Z}_{\text{fp,mod,k}}) = r \cdot (\lambda T)^{r-1}$$
For other components $K$ (that support simplex operation) in redundancy degree $r$:
$$P(\mathbb{Z}_{\text{fp,mod,k}}) = (\lambda T)^{r}$$
Redundant Platoform Development
Finding redundancy degree
Sensors and Computers
- Integrity: we need a redundancy degree $r = 2$ to ensure best fault detection; hence: avoid $f_O$
- Reliability: we need a redundancy degree $r \ge 2$ to ensure $P(\mathbb{Z}_{\text{fp,mod,k}})$ meets the requirement
Actuators
- Integrity: we want a redundancy degree $r = 1$ to suffice to avoid $f_O$
- Reliability: we need a redundancy degree $r \ge 1$ to ensure $P(\mathbb{Z}_{\text{fp,mod,k}})$ meets the requirement
Analytical Redundancy for Actuators
- To ensure integrity with $r = 1$, analytical redundancy is implemented in the form of a digital twin that the computer executes during runtime.
Step 1:
Develop platform architecture based on signal requirements fromYRD
Result: Simplex platform architecture
Step 2:
Develop platform architecture based on state requirements fromYRD
Result: Redundant platform architecture
System Design: Redundant Computers
Integrity: Quadruplex Computer, remember valid states from earlier this chapter. States to analyze: byzantine fault in quadruplex, byzantine fault in triplex, double fault in quadruplex. Other states are not minimal cut sets.
- no byzantine faults will lead to out-of-control in quadruplex mode R-YDD-6
- byzantine faults in triplex (after one passive loss) may occur R-YDD-7
- double faults lead to out-of-control R-YDD-8
- the overall out-of-control probability is $< 4 \cdot 10^{-10}$
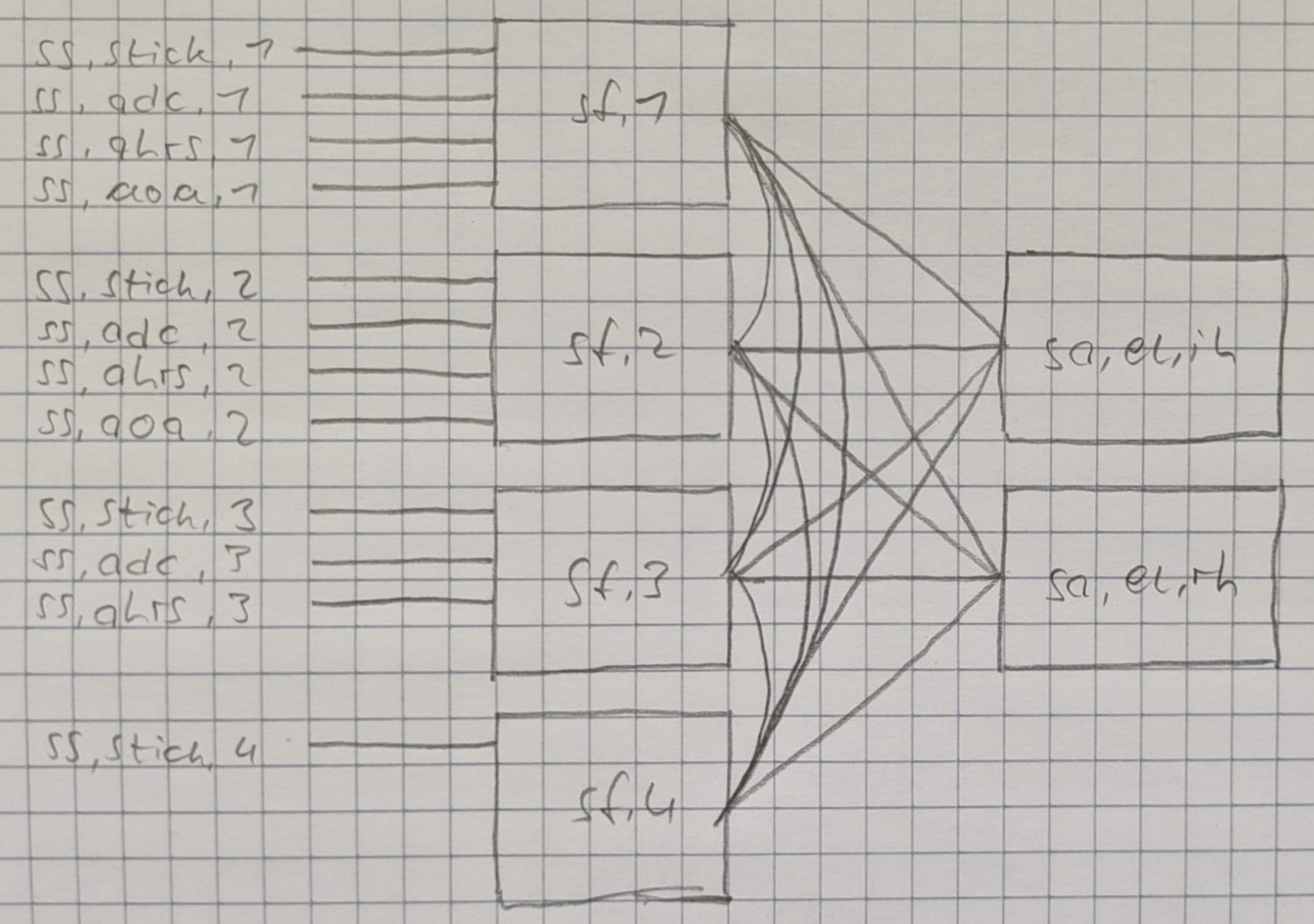
System Design: Redundant Sensors
Computers read sensor data, hence sensors have to connect to computers. This is generally referred to as ”strapping”. Within this lecture, we have 1:1 strapping and cross-strapping.
1:1 Strapping: Each sensor connects to a single computer, i.e. has only one connection
Cross strapping: Each sensot connects to each of the single computers, i.e. it has four connections in case of quadruplex redundant computers
Flight stick
- The stick sensor connects only to a single computer lane.
- This means the sensor fails whenever a computer lane fails.
- The lanes fails with 1 · 10−4 h−1 and thus dominates the sensor failure.
- This will not suffice! (P (Zfp,mod,rf ) = 3 · 10−8)
- Why? Rules of thumb apply to cross-strapped components.
- At least 4 sensors (same reliability as for redundant computer)
Redundant Actuators / Elevators
We try to tackle the out-of-control case by digital twins (analytical redundancy). Each law needs at least one elevator actuator. Passive failure of direct law is the most stringent requirement.
Development results
- We found an initial redundant platform architecture.
- We used rules of thumb and ignored more complex connection / interactions
- Next step: validate the developed architecture
Platform Validation
We did not consider:
-
combined computer lane and sensor failures
-
the failure budget must account for all passive failures
-
how to meet the out-of-control budget for actuators
-
validation: loss of direkct law
-
validation: loss of alternate law
-
validation: loss of normal law
conclusion
- State-Transfer-Functions for modules
- Redundant Computer Behavior
- Redundant Sensor Behavior
- Redundant Actor Behavior
- Simplified Markov-based Safety Assessment
- Actual Redundant Platform Development
- Redundant Platform Validation