System Design 1 - Chapter 1
09 April 2025, Bastian Luettig
Goals
System Design 1: Lecture
- allocate safety requirements to a system
- develop a suitable system architecture using the all-service strategy
- develop a suitable platform management software for the architecture
System Design 2: Lab course
- actually program redundancy mechanisms
- demspntrate deep understanding of the all active architecture
- show properties of this architecture
Why is system development so complex?
- high system redundancy and safety
- New Cockpit design
What does the system do?
Pilot uses stick deflection to control vertical acceleration (load factor control)
- stick centered, stationary level flight $\phi = 0, a_z = 0$
- stick pulled, rotates nose upwards $\phi > 0, a_z > 0$
- stick pushed, rotates nose downwards $\phi < 0, a_z < 0$
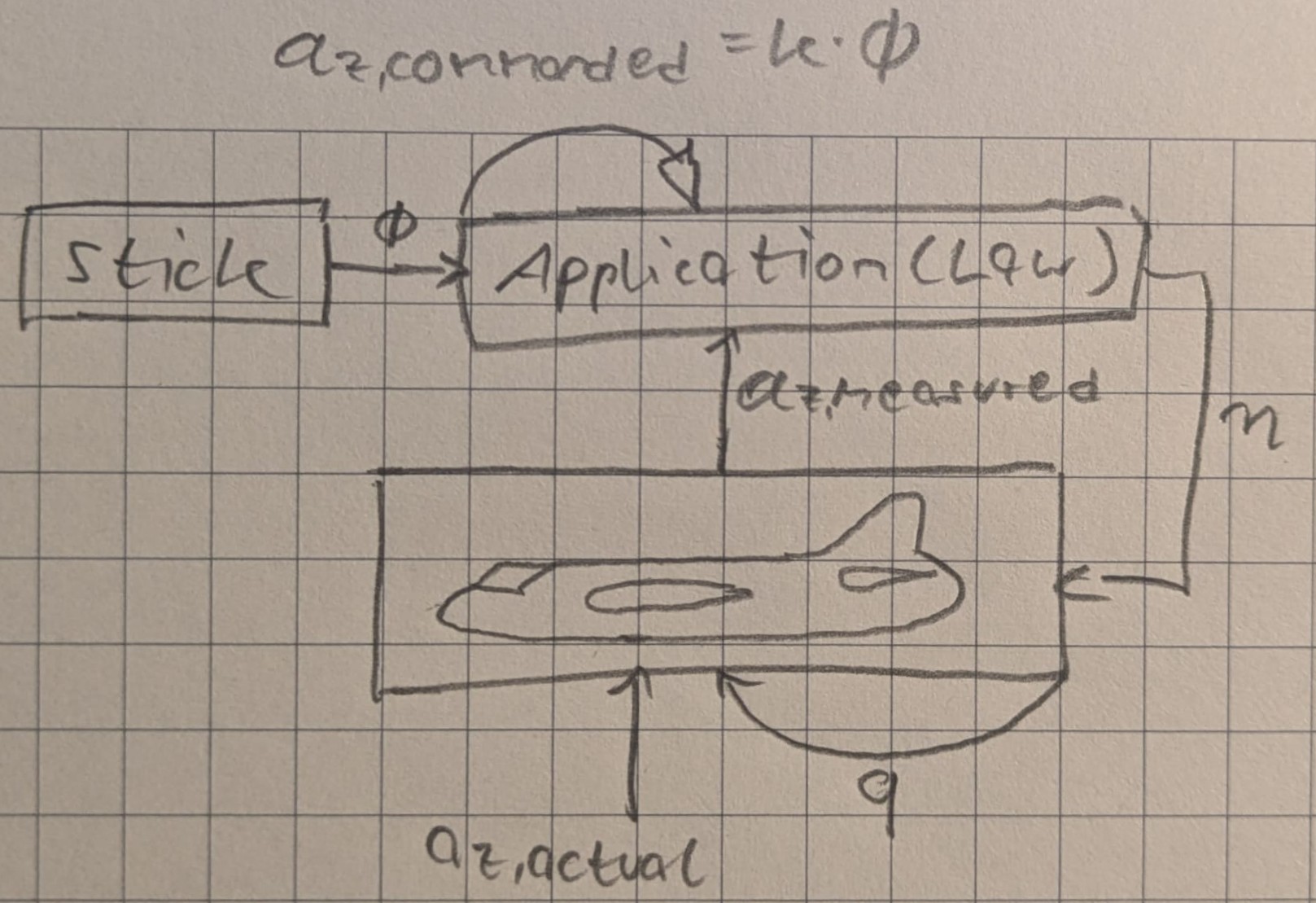
System development for load factor control and protections, e.g. stall protection limits $\alpha$
more complex applications (laws) that require capable controllers / computers
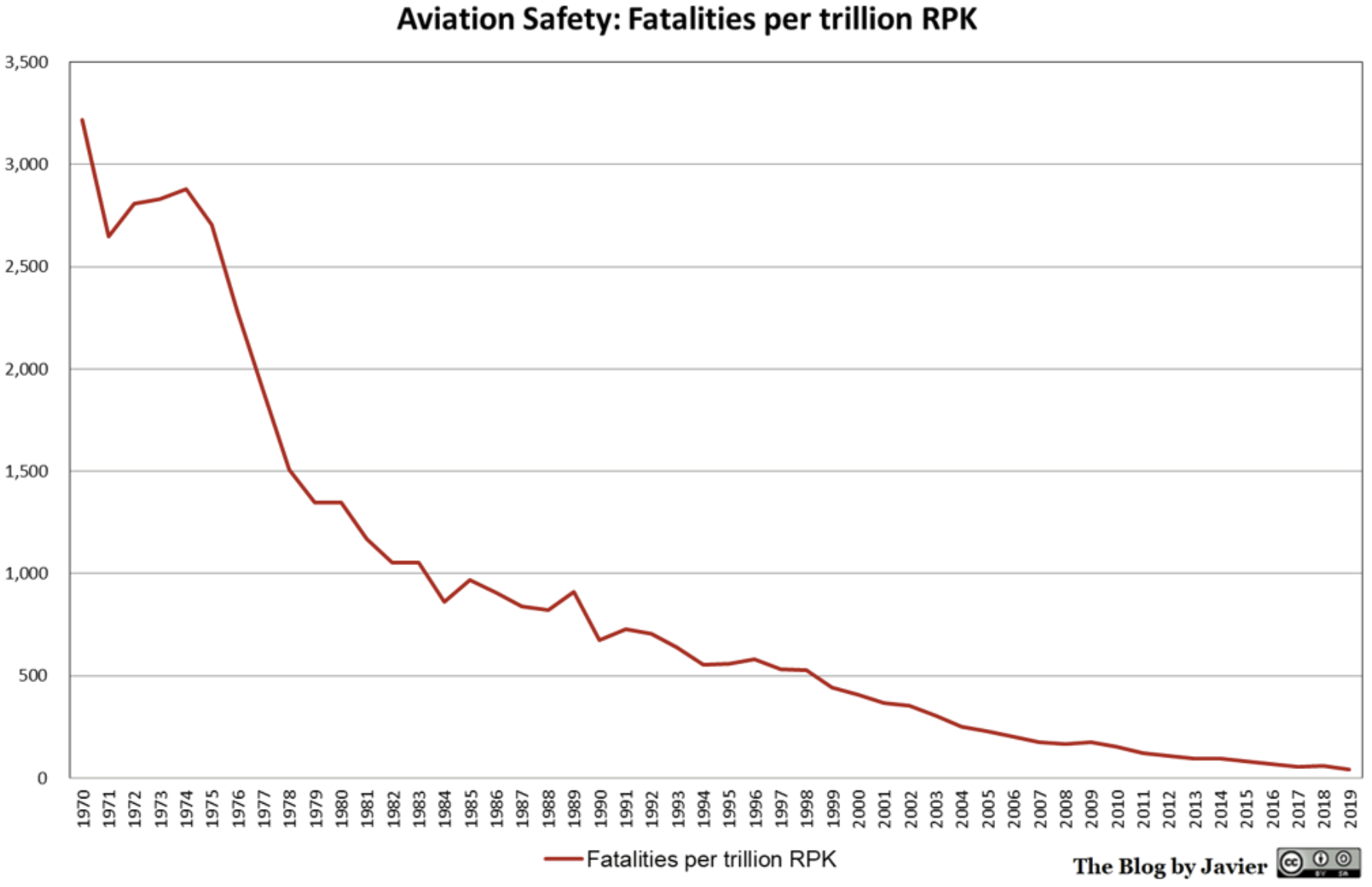
Safety (for one flight hour per system)
- probable: $10^{-3}h^{-1}$
- remote: $10^{-5}h^{-1}$
- extremly remote: $10^{-7}h^{-1}$
- extremly improbable: $10^{-9}h^{-1}$
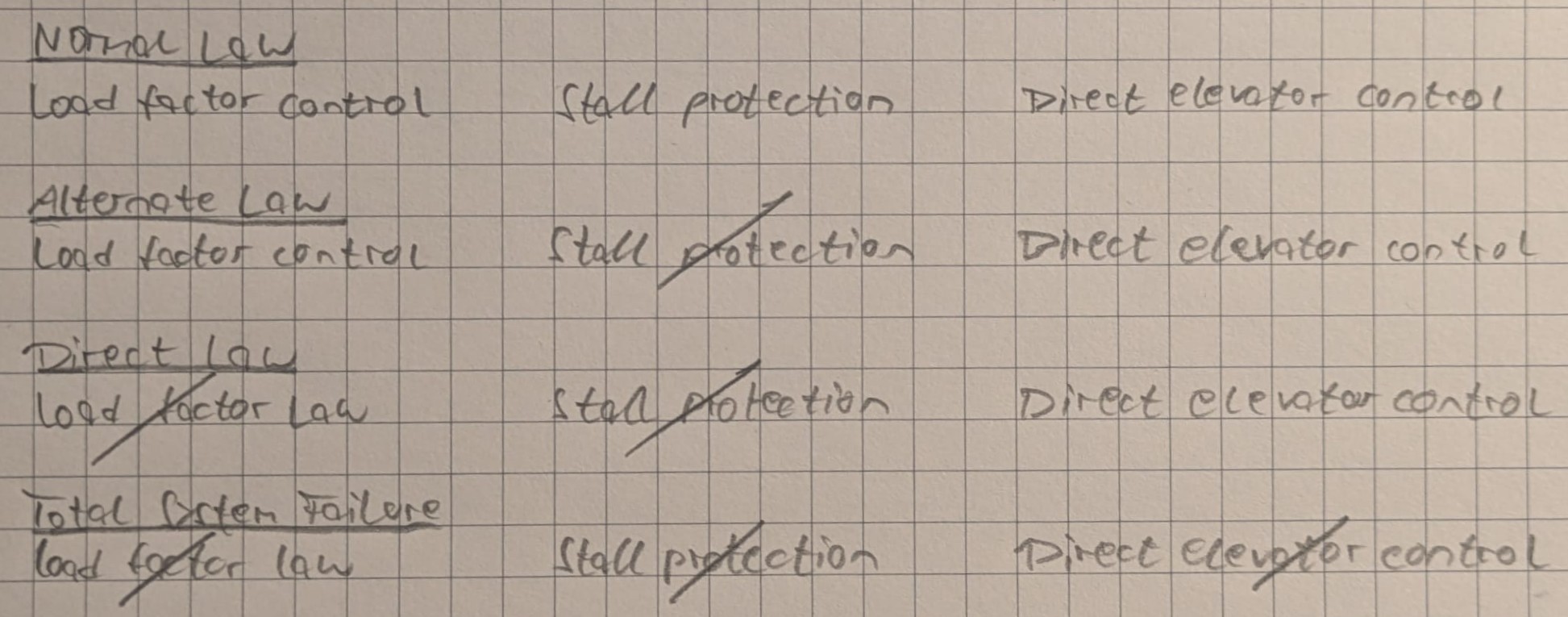
Degradation: Systems could degrade in function when losing certain sensors
systems can operate in different modes
the modes depend on the system's state
the failure of modes might have different safety-criticality
Trimmable horizontal stabilizers in emergencies can be used to manually control elevation in large airliners
$P(lossOfNormalLaw) = 10^{-4}$
$P(lossOfNormalLaw, alternateLaw) = 10^{-7}$
$P(lossOfNormalLaw, alternateLaw, directLaw) = 10^{-9}$
Simplex architecture oftentimes cannot meet the reliability figures required for high safety Other options:
- Having multiple independant channels - problems arise if sensor values are slightly different
- Having multiple computers communicate and detemine the correct operation
Redundant systems challenges
- monitoring
- computer.replica-determinsim
- input and output consensus
- byzantine faults
separation of application and platform
separating the flight control application law (IFR) and redundant computing platform (ILS)
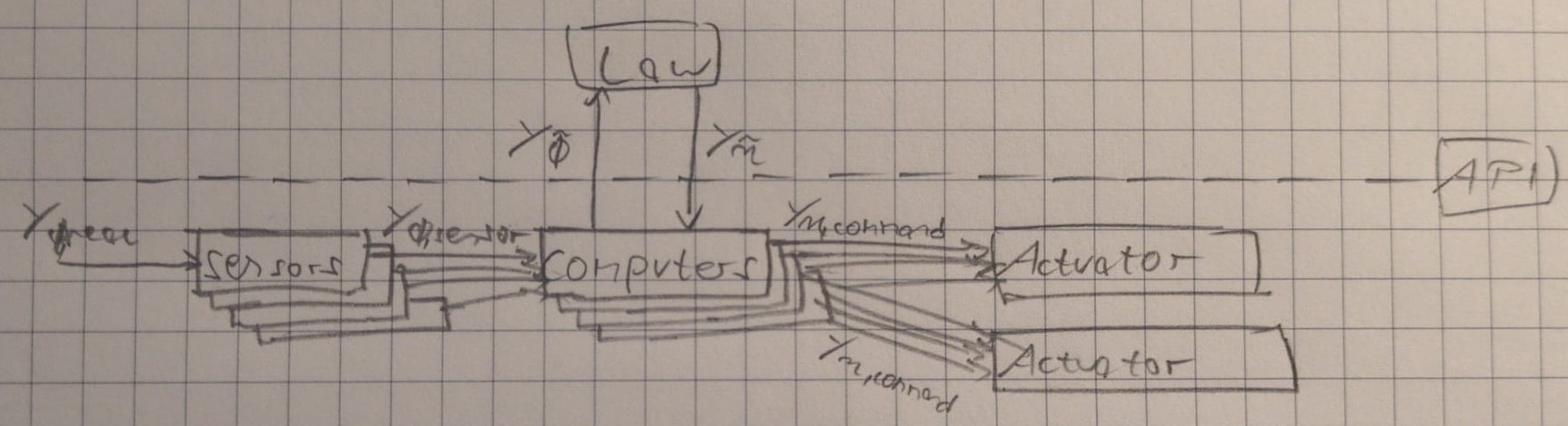
law: The flight control application needs to know $\phi$ only, the distributed, redundant system
architecture is transparent to the law
platform: The actual function of the law is unknown to the platform management. The control function is
transparent to the platform
Writing a Systems Requirement Document (1)
Fundamentals
- Signal $u$ / $y$: designates the value of the signal
- State $z$: designates the state of a signal
- Status $s$: designates the functional status of a component, Platform management computes this value
- Signal transfer value $T$: function the canges the input signals to output signals depending on the mode
- State transfer function $Z$: function that changes the input states and platform states $z_{pf}$ to output states
- Evaluation function $\varepsilon$: function that returns the maximum available degredation a system can perform based on the input states